## Group 10 Project 1.2
### Final presentation
Attempt to go to Titan and back with the lowest cost of fuel and as fast as possible.
_Fabio Barbero, Krzysztof Cybulski, Cavid Karca, Margarita Naryzhnyaya, Elliot Doe, Michael Balzer_
kutt.it/group10
---
## Goal of the project - 1
### Making a Solar System
----
## Mathematical model
### Phase 1
_Gravitational force_
$$F = G \cdot\frac{m_1\cdot m_2}{d^2}$$
_Euler's method_
$$\vec v_{t+1} = \vec v_t + \vec a_{t}\cdot \Delta t$$ $$\vec x_{t+1} = \vec x_t + \vec v_{t}\cdot \Delta t + \frac{\vec a_{t} \cdot \Delta t}{2}$$
----
### Phase 2, 3: Leapfrog
| Basic | Kick-drift-kick form |
| -------- | -------- |
|$$\vec v_{t+\frac{1}{2}}=\vec v_{t-\frac{1}{2}}+\vec a_t\Delta t$$ $$\vec x_{t+1}=\vec x_t+\vec v_{t+\frac{1}{2}}\Delta t$$|$$\vec v_{t+\frac{1}{2}} = \vec v_t + \vec a_t \frac{\Delta t}{2}$$ $$\vec x_{t+1} = \vec x_t + \vec v_{t + \frac{1}{2}}\Delta t$$ $$\vec v_{t+1} = \vec v_{t + \frac{1}{2}} + \vec a_{t+1} \frac{\Delta t}{2}$$|
----
### Phase 2, 3: Verlet
$$\vec x_{n+1}=2\cdot\vec x_{n-1}+\vec a \cdot \Delta t^2$$
----
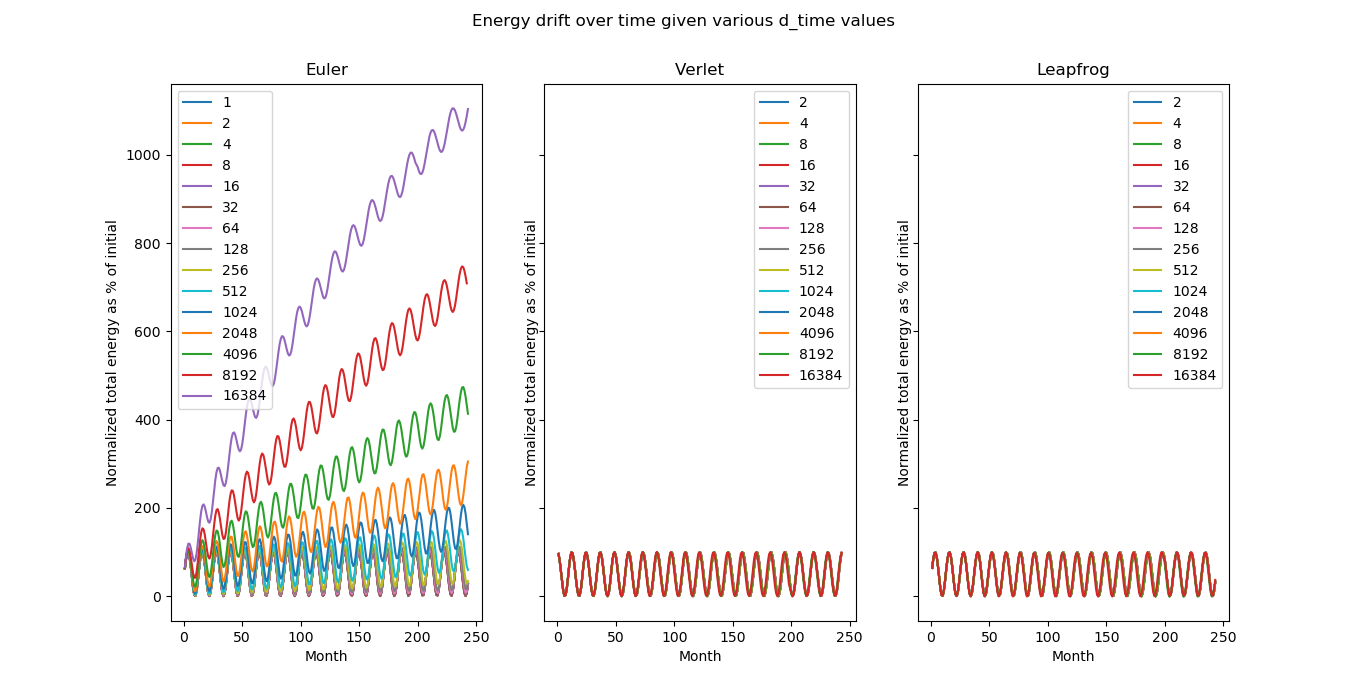
### Energy drift
----
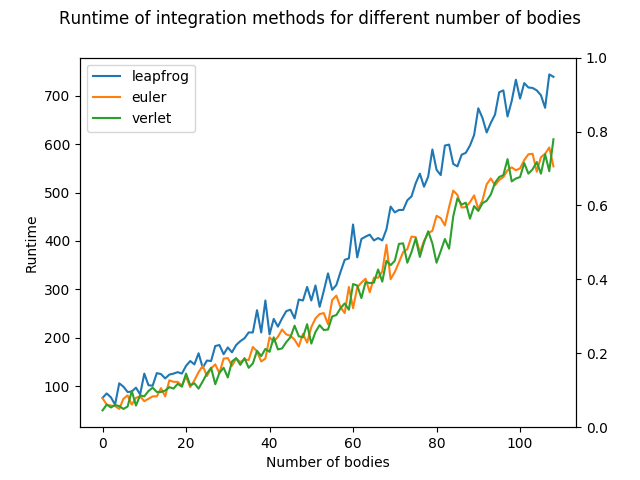
### Runtime of Leapfrog, Euler and Verlet methods
----
## Precomputing positions
<!-- .slide: data-background="/uploads/sapproximator1.gif"-->
----
## Visualisation 2D
----
## Visualisation 3D
---
## Central body simulation
- Rotation
- Atmosphere
- Air resistance
----
## Rotation
- Planets orbit the sun with a certain speed and on rotate around their axis
- Useful to know the location where the landing should take place
- Only taken into account when landing on celestial bodies
----
## Rotation
----
## Atmosphere
### Wind on Titan
- Wind load formula:
$$A \cdot p \cdot v^2 \cdot 0.5 \cdot C$$
Where $A$ is the projected area
$p$ is the pressure
$v$ is the velocity of the wind
$C$ is the drag coefficient
----
## Wind function
----
## Wind demo
----
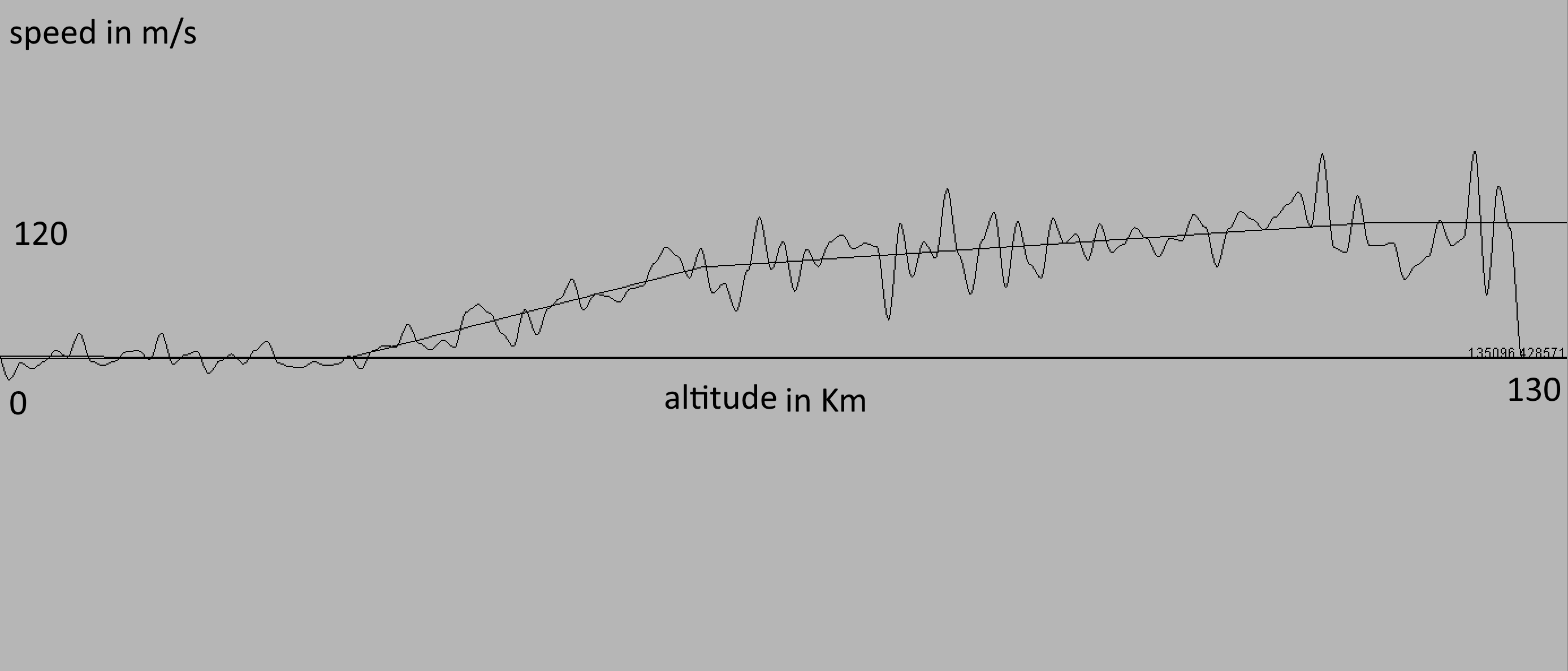
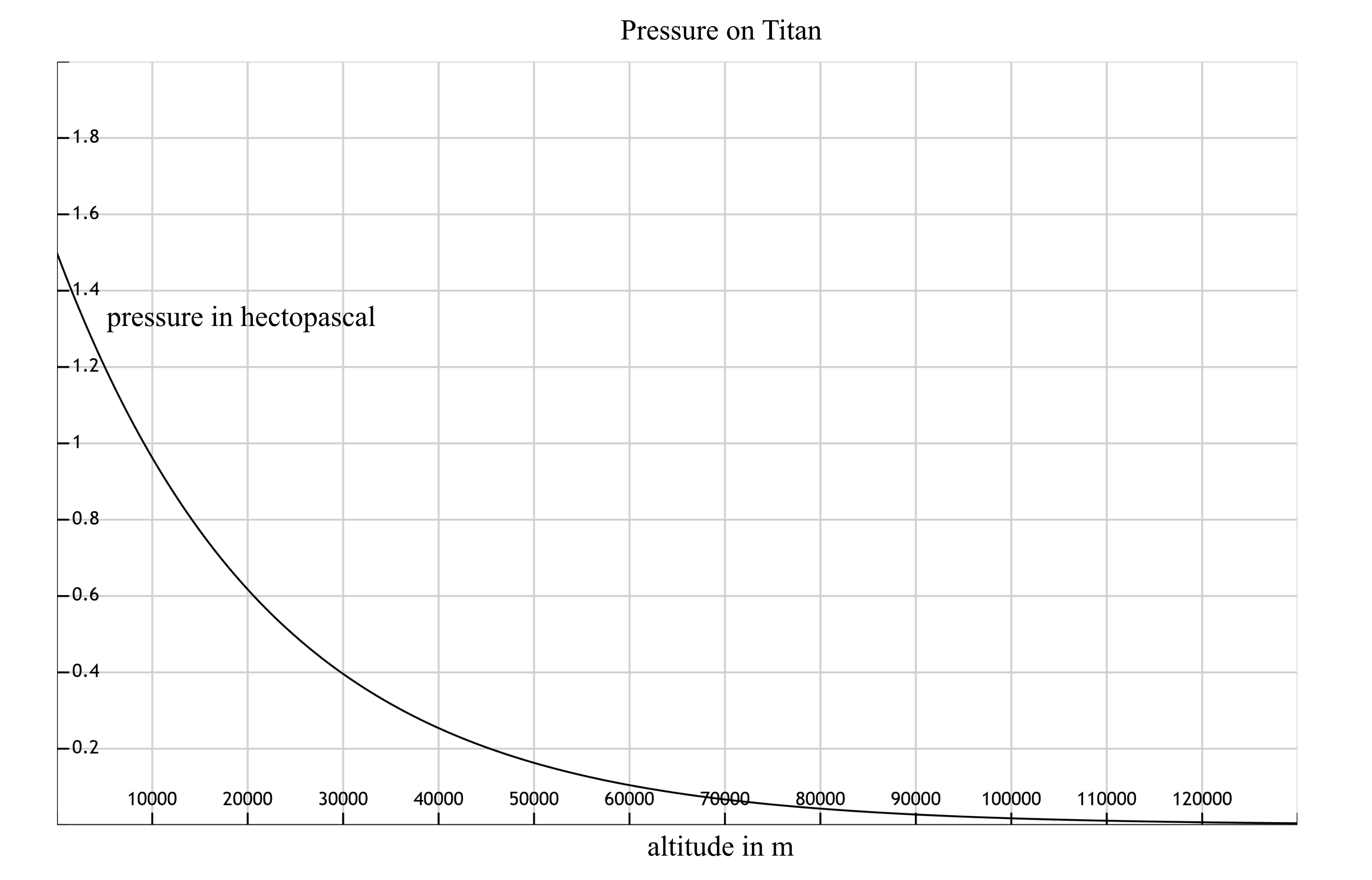
## Air resistance
Air resistance:
$$F = 0.5 \cdot p(a) \cdot C \cdot A \cdot v^2$$
$p(a)$ pressure in terms of altitude
$C$ drag coefficient
$A$ area spacecraft
$v$ speed of spacecraft
----
### Pressure function
---
## Space voyage
- consists of different spacecraft phases
- combined they represent a space mission
----
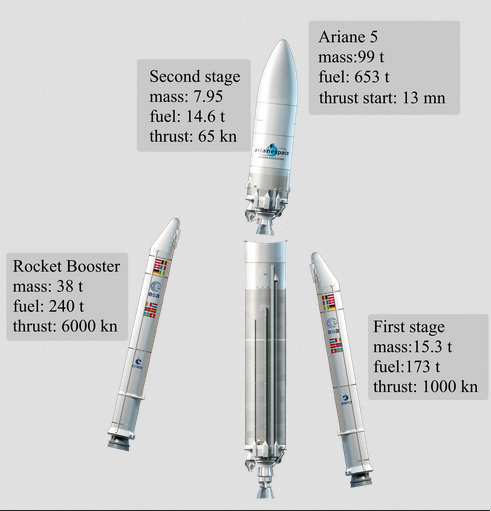
## Spacecraft
----
## Spacecraft
---
## Switching from 2D to 3D
---
## Launching from Earth
- using a multistage Rocket to enter stable orbit
- simple feedback controller
- adjusting angle depending on altitude
----
## Hohmann transfer
$v_{p} = \sqrt{GM\left(\frac{2}{r} - \frac{1}{a} \right)}$
----
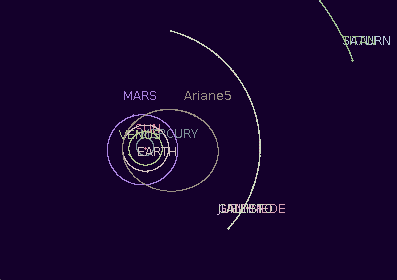
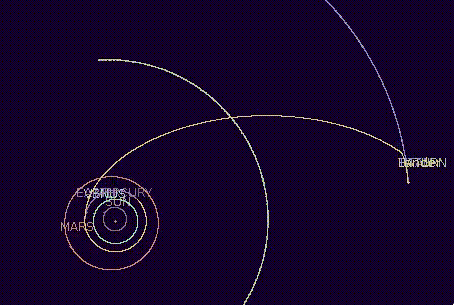
## Interplanetary travel
---
## Landing on Titan
----
### Open-loop Controller
A controller that only gets time as the input.
- This is doable with constant gravity. Realistic gravity makes precomputation significantly more complex.
- Simple implementation with constant gravity.
----
### Open-Loop controller pre-computation
---
### Closed-loop Controller
- AKA feedback controller
- Used to determine the thrust based on the current position and velocity.
- PID-Controller
----
### PID-Controller
- Proportional
- Integral
- Derivative
Combined, they form the PID-controller.
----
### Proportional control
$$P_{out}=K_p\cdot e(t)$$
$P_{out}$ = Proportional correction
$K_p$ = Adjustable constant for proportional controller
$e$ = error
$t$ = time
----
### Integral control
$$I_{out} = K_i\int _{0}^{t} e(\tau)\, d\tau$$
$I_{out}$ = Integral correction
$K_i$ = Adjustable constant for integral controller
$\tau$ = Variable of the integral
----
### Derivative control
$$D_{out} = K_d\cdot \frac{de(t)}{dt}$$
$D_{out}$ = Derivative correction
$K_d$ = Adjustable constant for derivative controller
$\tau$ = Variable of the integral
---
## Back to Earth
- Similar procedure, but reversed
---
## Fuel
- Kerosene (or RP-1, rocket propellant 1) is used as fuel for the spaceship.
- Kerosene is a bipropellant.
- Liquid Oxygen (LOX) used as oxidizer for the fuel.
----
### Mass flow rate
Mdot is the mass flow rate of the spacecraft.
$$\dot{m} = r\cdot V\cdot A$$
$r$ = Density of the fuel
$V$ = Velocity of the fuel
$A$ = Area of the nozzle
----
### Mass flow rate
$$\boldsymbol {F = \dot{m}\cdot V_e + (P_e - P_0)\cdot A_e}$$
$F$ = Thrust in N
$\dot{m}$ = Mass-flow rate in kg/s
$V_e$ = Exit velocity
$P_e$ = Exit pressure
$p_0$ = free stream pressure
$A_e$ = Exit area
---
## Fuel use
| Real Ariane 5 | Modified |
| -------- | -------- |
|||
---
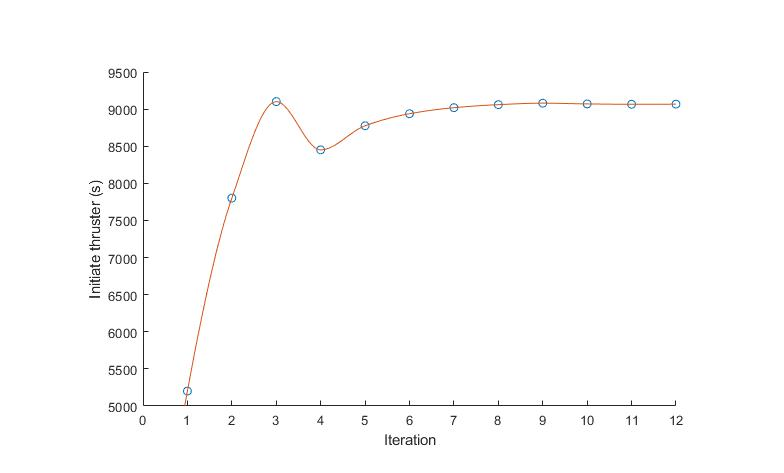
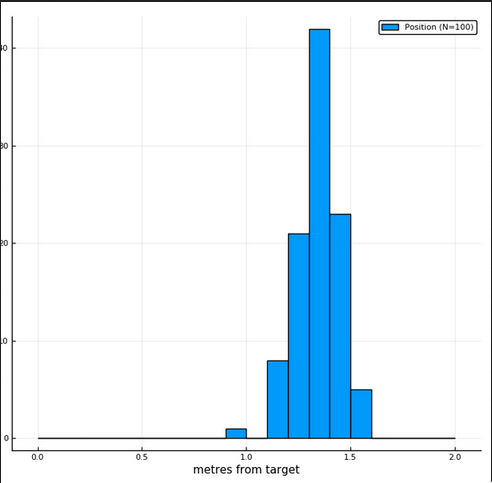
### Landing results
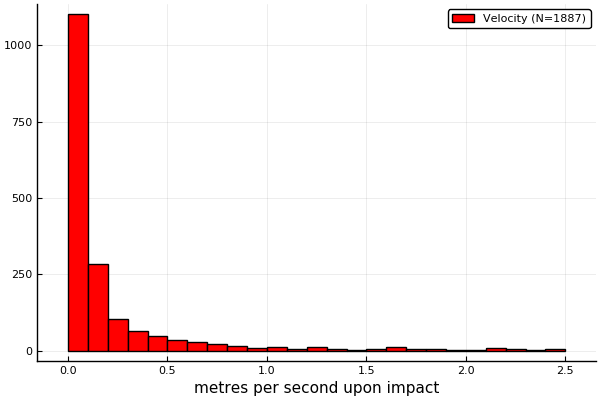
----
### Landing results
---
# Conclusion
----
# Questions?